|
ESTER
Evolution STEllaire en Rotation
|
|
ESTER
Evolution STEllaire en Rotation
|
The diff_leg class implements Legendre numerical differentiation. More...
#include <numdiff.h>
Public Member Functions | |
| diff_leg () | |
| ~diff_leg () | |
| diff_leg (const diff_leg &) | |
| diff_leg & | operator= (const diff_leg &) |
| void | init () |
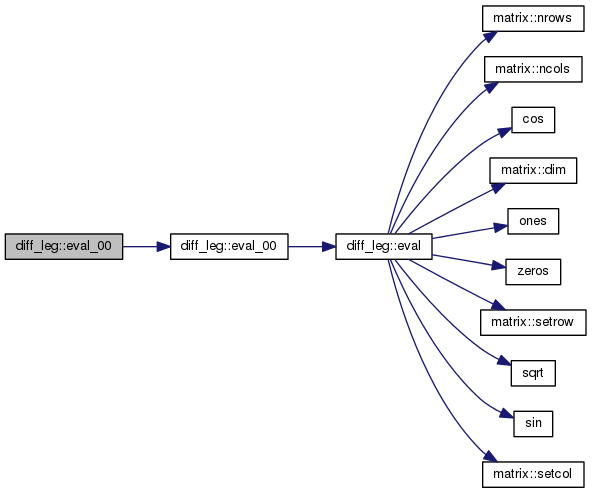
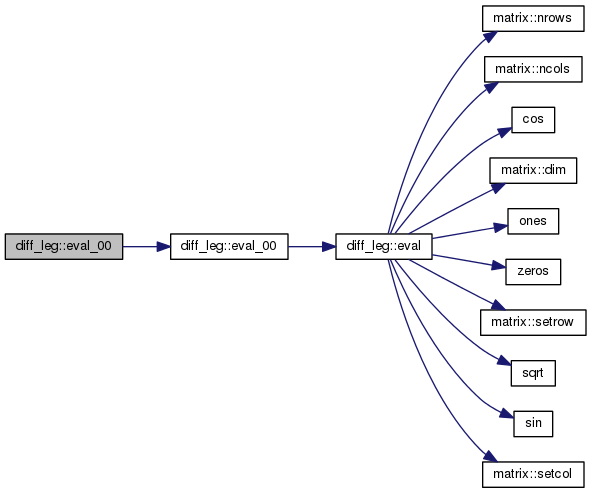
| matrix | eval_00 (const matrix &y, const matrix &thi, matrix &T) const |
| matrix | eval_00 (const matrix &y, const matrix &thi) const |
| matrix | eval_00 (const matrix &y, double thi) const |
| matrix | eval_00 (const matrix &y, double thi, matrix &T) const |
| matrix | eval_01 (const matrix &y, const matrix &thi, matrix &T) const |
| matrix | eval_01 (const matrix &y, const matrix &thi) const |
| matrix | eval_01 (const matrix &y, double thi) const |
| matrix | eval_01 (const matrix &y, double thi, matrix &T) const |
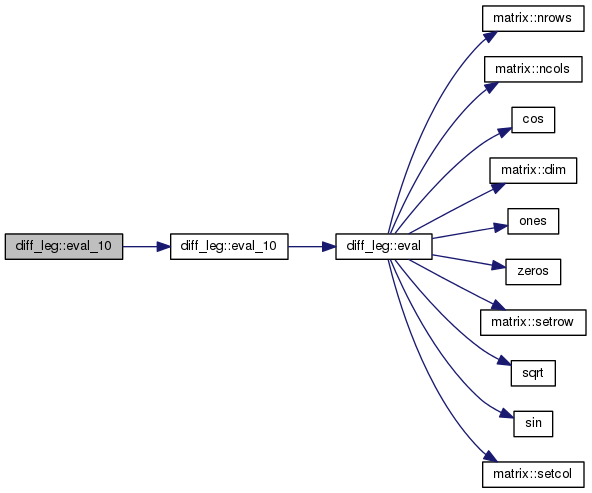
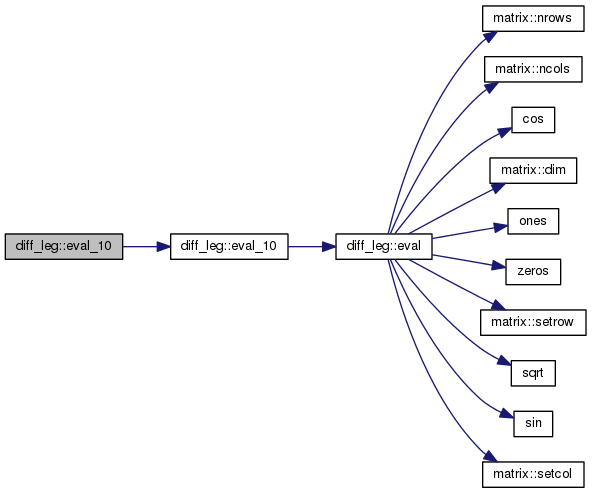
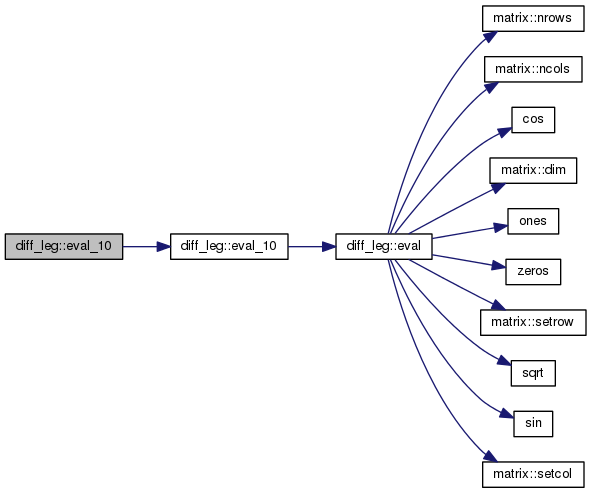
| matrix | eval_10 (const matrix &y, const matrix &thi, matrix &T) const |
| matrix | eval_10 (const matrix &y, const matrix &thi) const |
| matrix | eval_10 (const matrix &y, double thi) const |
| matrix | eval_10 (const matrix &y, double thi, matrix &T) const |
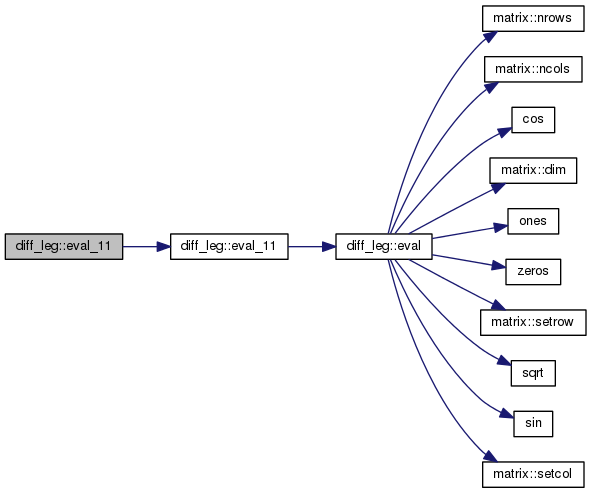
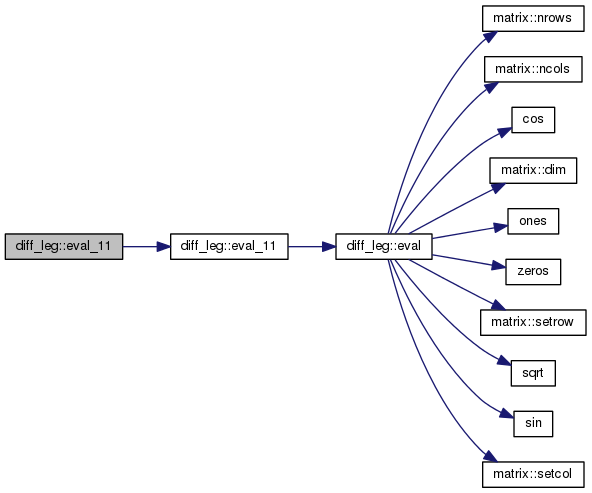
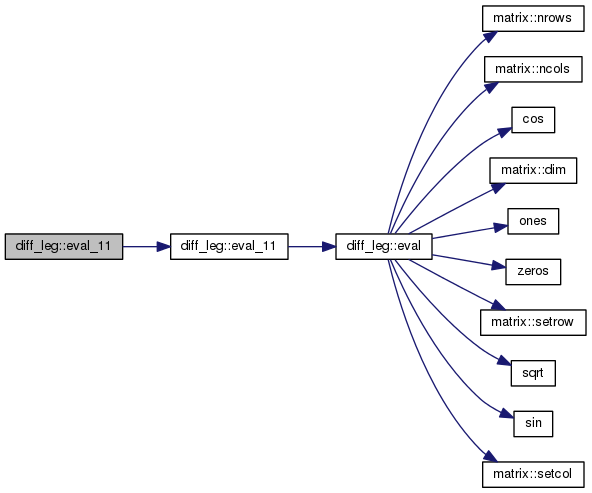
| matrix | eval_11 (const matrix &y, const matrix &thi, matrix &T) const |
| matrix | eval_11 (const matrix &y, const matrix &thi) const |
| matrix | eval_11 (const matrix &y, double thi) const |
| matrix | eval_11 (const matrix &y, double thi, matrix &T) const |
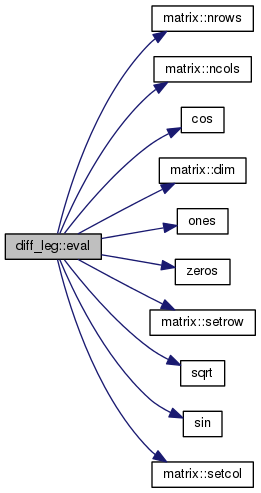
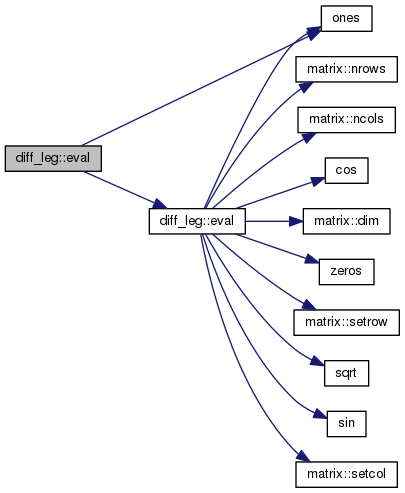
| matrix | eval (const matrix &y, const matrix &thi, matrix &T, int par_pol, int par_eq) const |
| matrix | eval (const matrix &y, double thi, matrix &T, int par_pol, int par_eq) const |
| matrix | l_00 () const |
| matrix | l_01 () const |
| matrix | l_10 () const |
| matrix | l_11 () const |
Public Attributes | |
| int | npts |
| matrix | th |
| matrix | P_00 |
| matrix | P_01 |
| matrix | P_10 |
| matrix | P_11 |
| matrix | P1_00 |
| matrix | P1_01 |
| matrix | P1_10 |
| matrix | P1_11 |
| matrix | dP1_00 |
| matrix | dP1_01 |
| matrix | dP1_10 |
| matrix | dP1_11 |
| matrix | D_00 |
| matrix | D_01 |
| matrix | D_10 |
| matrix | D_11 |
| matrix | D2_00 |
| matrix | D2_01 |
| matrix | D2_10 |
| matrix | D2_11 |
| matrix | I_00 |
| matrix | lap_00 |
| matrix | lap_01 |
| matrix | lap_10 |
| matrix | lap_11 |
Private Member Functions | |
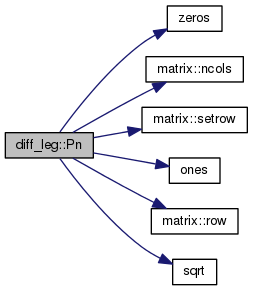
| matrix | Pn (int n, matrix x) |
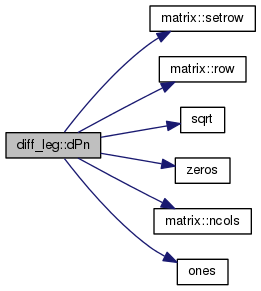
| matrix | dPn (int n, matrix x, matrix p) |
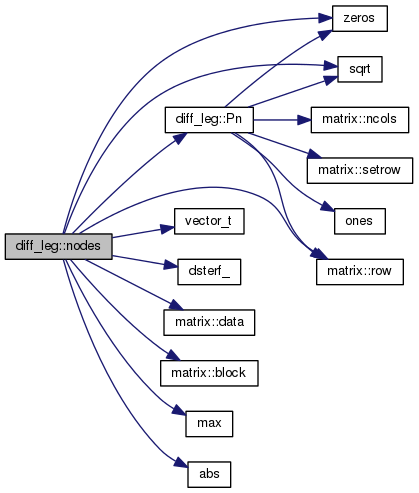
| matrix | nodes (int n, matrix &w) |
The diff_leg class implements Legendre numerical differentiation.
The basis function are Legendre polynomials \( P_l(x) \), and, for \( n \) points, collocation points are defined as the roots of \( P_n(x) \).
\[ P_n(x)= \frac{1}{2^n n!} \frac{d^n}{dx^n}[(x^2-1)] \]
| diff_leg::diff_leg | ( | ) |
| diff_leg::~diff_leg | ( | ) |
| diff_leg::diff_leg | ( | const diff_leg & | leg | ) |
| matrix diff_leg::eval | ( | const matrix & | y, |
| const matrix & | thi, | ||
| matrix & | T, | ||
| int | par_pol, | ||
| int | par_eq | ||
| ) | const |
|
inline |




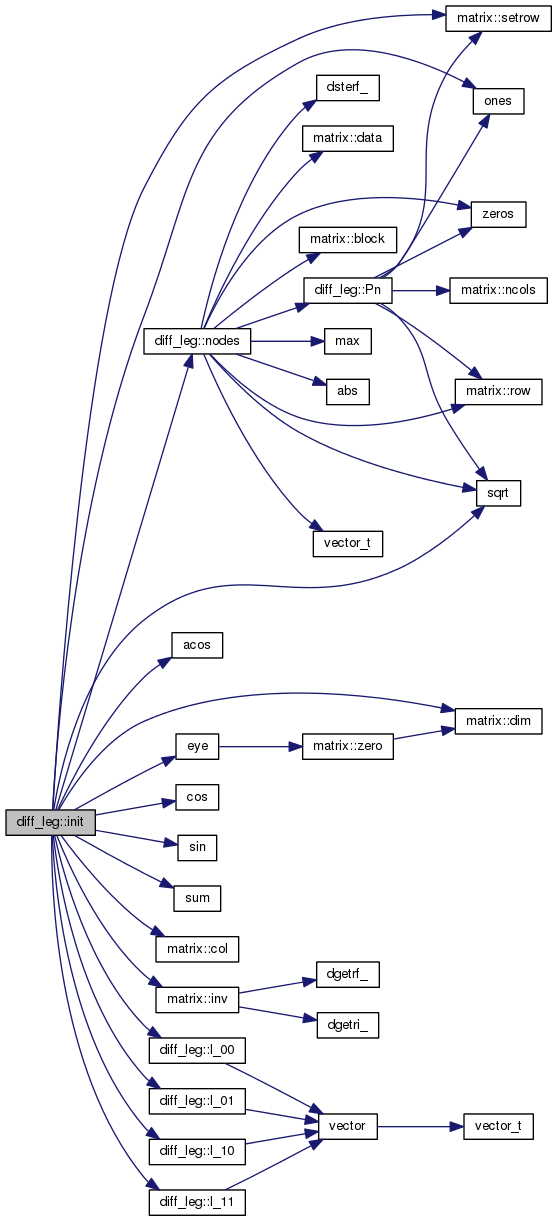
| void diff_leg::init | ( | ) |
| matrix diff_leg::l_00 | ( | ) | const |

| matrix diff_leg::l_01 | ( | ) | const |

| matrix diff_leg::l_10 | ( | ) | const |

| matrix diff_leg::l_11 | ( | ) | const |

| matrix diff_leg::D2_00 |
| matrix diff_leg::D2_01 |
| matrix diff_leg::D2_10 |
| matrix diff_leg::D2_11 |
| matrix diff_leg::D_00 |
| matrix diff_leg::D_01 |
| matrix diff_leg::D_10 |
| matrix diff_leg::D_11 |
| matrix diff_leg::dP1_00 |
| matrix diff_leg::dP1_01 |
| matrix diff_leg::dP1_10 |
| matrix diff_leg::dP1_11 |
| matrix diff_leg::I_00 |
| matrix diff_leg::lap_00 |
| matrix diff_leg::lap_01 |
| matrix diff_leg::lap_10 |
| matrix diff_leg::lap_11 |
| int diff_leg::npts |
| matrix diff_leg::P1_00 |
| matrix diff_leg::P1_01 |
| matrix diff_leg::P1_10 |
| matrix diff_leg::P1_11 |
| matrix diff_leg::P_00 |
| matrix diff_leg::P_01 |
| matrix diff_leg::P_10 |
| matrix diff_leg::P_11 |
| matrix diff_leg::th |
 1.8.6
1.8.6